
یک دستگاه دریل ارتوپدی چند منظوره، از جمله یک موتور تنظیم کننده سرعت، از این جهت مشخص میشود که شامل یک اتصال دستی، یک مجموعه انتقال انعطافپذیر، یک مته استخوانی، یک سر برش نیمکره، یک سر کاتر تعمیر صورت انتهایی، یک جمجمه است. مته، استئوتوم، اره رفت و برگشتی، اره نوسانی موازی محوری، اره نوسانی عمودی محوری یا اره دایره ای. مدل سودمند پنج عملکرد اصلی دریل ارتوپدی بیش از ده عملکرد جزئی را ادغام میکند.بعضی از ابزارهای مورد استفاده در جراحی ارتوپدی را میتوان با اتوکلاو به طور کلی استریل کرد.دریل ارتوپدی موفق، دریل ارتوپدی باید قدرتمند، کارآمد و سبک باشند.دستگاه دریل ارتوپدی چند منظوره مدل کاربردی متعلق به ابزار یا دستگاه های جراحی است و مربوط به یک دستگاه جراحی دریل ارتوپدی با عملکردهای متعدد مانند ابزارهای مته کاری، اره کردن و جایگزینی سر استخوان ران است و به ویژه برای استفاده در عملیات ارتوپدی مناسب است.ابزارهای جراحی دریل ارتوپدی پزشکی موجود عموماً از یک کانکتور دستی، یک موتور متصل به دو سر کانکتور دستی و یک چاقو، مته یا اره تشکیل شده اند؛ از آنجایی که موتور به طور ثابت به کانکتور دستی متصل است، به سختی جدا می شود و با اتوکلاو به طور کلی نمی توان آن را استریل کرد،

اجزاء دریل ارتوپدی
1. یک دستگاه دریل ارتوپدی چند منظوره، شامل: یک موتور تنظیم کننده سرعت، که مشخصه آن این است که شامل:یک کانکتور دستی، کانکتور دستی شامل یک لوله بیرونی (1)، یک دسته نصب شده روی لوله بیرونی (1)، یک سوراخ مرکزی (3)، یک بلبرینگ داخلی (4) و به ترتیب متصل است. به دو سر لوله بیرونی (1) دو قاب مهره دار (2) متصل می شوند، دو سر از سوراخ مرکزی (3) قاب یاتاقان مهره (2) عبور می کنند و سنبه ها (5) شامل یک عضو انتقال (7) با یک سوراخ شش ضلعی داخلی (8) و یک انتها به طور ثابت به سر سنبه (5) متصل است، و یک مهره اتصال ابزار (9) که به صورت متحرک روی لوله بیرونی (1) قرار دارد.یک مجموعه انتقال انعطاف پذیر، مجموعه انتقال انعطاف پذیر از یک مهره (10) متصل به قاب یاتاقان مهره انتهایی (2)، یک مهره موقعیت یابی (11) متصل به بدنه موتور تنظیم کننده سرعت، و دو سر متصل به ترتیب تشکیل شده است. به مهره (10) لوله سیم پیچ (12) متصل به مهره موقعیت یابی (11) توسط یک شفت انتقال انعطاف پذیر (13) در لوله سیم پیچ (12) تشکیل شده است؛ یک انتهای شفت انتقال انعطاف پذیر (13) به طور ثابت است. روی دم سنبه قرار می گیرد (5) در سوراخ (6)، انتهای دیگر به طور ثابت در یک لوله اتصال شش ضلعی خارجی (14) قرار می گیرد که می تواند با محور چرخان موتور تنظیم کننده سرعت سوکت شود.و مته استخوان، سر برش نیمکره یا سر برش تعمیر سطح انتهایی متصل به سوراخ شش ضلعی داخلی (8) قسمت انتقال (7) یا سوراخ شش ضلعی داخلی (8) و مهره اتصال ابزار (9) قسمت انتقال (7) مته جمجمه متصل، استئوتوم، اره رفت و برگشتی، اره نوسانی موازی محوری، اره نوسانی عمودی محوری یا اره مدور.2. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1 که مشخصه آن این است که: شفت انتقال انعطاف پذیر (13) یک محور انتقال است که توسط یک طناب سیمی یا مجموعه ای از اتصالات جهانی تشکیل شده است.3. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1 که مشخص می شود: دسته به صورت متحرک بر روی لوله بیرونی (1) و دارای یک نشیمنگاه دسته (15) با یک نخ داخلی در یک انتهای آن است که به صورت متحرک روی لوله قرار دارد. لوله بیرونی (1) و حلقه محکم پین چند پنجه (16) که در نشیمنگاه دسته (15) قرار داده شده است، که به صورت متحرک روی لوله بیرونی (1) قرار دارد، با صندلی دسته (15) رزوه می شود و در موقعیت قرار می گیرد. نشیمنگاه دسته (15) مهره قفلی (17) و میله دسته (18) که با پایه دسته (15) متصل شده است را تشکیل می دهند.4. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، مشخص می شود که: انتهای دیگر عضو انتقال (7) دارای یک رزوه خارجی است و با یک مهره قفلی (19) با یک سوراخ مرکزی متصل می شود؛ یا در گیربکس. یک سوراخ شعاعی بر روی قطعه (7) تنظیم می شود و توپ ها، فنرها و شاخه ها به ترتیب در سوراخ ها قرار می گیرند.5. دستگاه جراحی ارتوپدی الکتریکی چند منظوره طبق ادعای 1، 2، 3 یا 4، که مشخصه آن این است که: مته استخوان از یک پیچ (20) و یک رابط شش ضلعی (21) در یک انتهای آن تشکیل شده است.6. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: سر برش نیمکره دارای یک سوراخ شش ضلعی (23) در مرکز، و گروهی از مارپیچ های برجسته بر روی سطح کروی است. یا لبه چاقو نابجا (24) و نیمکره توخالی (22) سوراخ (25) در مجاورت لبه چاقو (24) و یک سر آن شاتون شش ضلعی (27) دارد و سر دیگر دارای سوراخ شش ضلعی (23) است. کانکتور متصل (26) تشکیل شده است.7. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، که مشخص می شود: سر کاتر تعمیر سطح انتهایی توسط یک میله اتصال شش ضلعی (29) و یک سطح انتهایی به اتصال شش ضلعی ثابت می شود. میله (29) متصل یا متصل به طور کلی، سطح انتهایی دیگر با گروهی از لبه های برش (30) و یک دیسک (28) با یک سوراخ رزوه شده مرکزی، و یک میله موقعیت (112) با رزوه مرکزی توزیع شده است. سوراخ دیسک (28).8. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: مته جمجمه مذکور دارای یک نخ داخلی (32) در یک انتها و یک غده با یک سوراخ مرکزی است که به طور ثابت در انتهای دیگر متصل است. محفظه (31) از (33)، یاتاقان (34) و یاتاقان (35) که به طور ثابت در محفظه (31) چیده شده اند، و شافت محرک چرخ دنده شش ضلعی (36) که با یاتاقان (34) سوکت شده است و دارای یک سوراخ (37) در مرکز، فنر جداکننده (38) که در سوراخ مرکزی (37) قرار می گیرد، از سوراخ مرکزی غده (33)، انتهای داخلی و انتهای بیرونی سوکت متحرک عبور می کند. یاتاقان (35) محور انتقال مخروط مته (40) (39) است؛ انتهای مخروطی شافت انتقال مخروطی (39) مجاور و با انتهای مخروطی شفت انتقال مخروط شش ضلعی فاصله دارد. 36)، و مرکز انتهای مخروطی شفت انتقال مخروطی (39) در مرکز Boss در سوراخ (37) فعالیت دارد.9. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 8، مشخص می شود که: سطح بیرونی محفظه (31) نیز با یک دستگاه تنظیم عمق حفاری استخوان ارائه شده است؛ دستگاه به طور ثابت وصل یا یکپارچه با محفظه (31) است. لوله محدود 2 سوراخ (43) (41)، پیچ موقعیت (42) که در لوله حد (41) قرار می گیرد و در 2 سوراخ (43) قرار دارد و با پیچ موقعیت (42) متصل می شود. از 2 مهره قفل تنظیم کننده (44) متصل تشکیل شده است.10. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: استئوتوم یا اره رفت و برگشتی مذکور دارای یک نخ داخلی (46) در یک سر و یک سوراخ مرکزی در انتهای دیگر است. 45) از غده (47)، یاتاقان (48) به طور ثابت در بدنه (45) نصب شده است، و بدنه اتصال که با یاتاقان سوکت شده است، یک بخش شش ضلعی (50) و سطح انتهایی دیگر یک بادامک (51) (49)، از طریق سوراخ مرکزی غده (47) تنظیم می شود، سطح انتهایی داخلی یک بادامک (53) در مجاورت بادامک (51) است، بخش داخلی با فنر (54) پوشیده شده است. و سطح بیرونی محیطی بخش داخلی دارای یک شیار راهنما محوری (55) است، انتهای بیرونی به صورت رزوه ای با یک مهره گیره (56) و یک رابط سر کاتر (52) با یک سوراخ مرکزی متصل می شود، یک سر آن در قسمت قرار می گیرد. شیار راهنما (55) و انتهای دیگر روی پین موقعیت یابی روی غده (47) (63) و یک سر اسکنه (57) یا تیغه اره (62) قرار دارد که یک سر آن در سوراخ مرکزی وصل است. انتهای بیرونی کانکتور سر کاتر (52) شکل می گیرد.11. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 10، مشخص می شود که: سر اسکنه (57) یک سر برش صاف (58)، یک سر برش R بیرونی (59)، یک سر کاتر R داخلی (60) یا سر برش چهره انتهایی R (61).12. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: اره آونگی موازی محوری دارای یک رزوه داخلی در یک سر و یک پوشش بالایی با یک سوراخ مرکزی است که به طور ثابت در انتهای دیگر متصل است. پوسته (64) از (65) به طور ثابت در یاتاقان (66) در پوسته (64)، آستین ثابت در یاتاقان (66)، یک بخش شش ضلعی (68) و انتهای دیگر دارای یک باس (69) است. یک شفت غیر عادی (67)، یک میله چرخشی (70) که به صورت متحرک در سوراخ مرکزی پوشش بالایی (65) قرار می گیرد، دارای یک شیار راهنما (71) در سطح انتهایی داخلی است و به صورت متحرک به بالا متصل است. پوشش (65) توسط یک پین (72)، تیغه اره (73) که به طور ثابت به بخش خارجی شاخک (70) متصل است از یک بلوک فشاری (74) و دو پیچ با فاصله (75) تشکیل شده است؛ باس (69) ) شفت خارج از مرکز (67) به صورت متحرک در شیار راهنمای (71) وجه انتهایی داخلی قرار دارد.13. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: اره نوسان عمودی محوری مذکور دارای یک رزوه داخلی در یک انتها و یک قسمت بالا با یک سوراخ شعاعی در انتهای دیگر است. 76 از روکش (77) به طور ثابت در یاتاقان (78) در پوسته (76)، آستین ثابت در یاتاقان (78)، یک بخش شش ضلعی (80) و انتهای دیگر دارای یک باس (81) است. ) از محور خارج از مرکز (79)، یک بخش در سوراخ شعاعی پوشش بالایی (77) متحرک است، بخش داخلی دارای یک شیار راهنما (83) است، و محور موقعیت یابی (84) به پوشش بالایی (77) متصل می شود. و سطح انتهایی محفظه (76) پیوند متحرک (82) از یک تیغه اره (85) تشکیل شده است که به طور ثابت از طریق یک بلوک فشار (85) و دو پیچ با فاصله به بخش بیرونی پیوند چرخشی (82) متصل است. (86)؛ باس شفت (79) (81) در شیار راهنمای (83) قسمت داخلی شاخک (82) متحرک است.14. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 1، 2، 3 یا 4، مشخص می شود که: اره مدور شامل یک محفظه (87) با یک رزوه داخلی (88) در یک انتهای آن است که به طور ثابت روی محفظه نصب شده است. یاتاقان (89) در 87) به طور ثابت روی یاتاقان (89) بسته شده است، یک بخش یک بدنه شش ضلعی است (91)، و طرف دیگر دارای یک سوراخ رزوه دار مرکزی (92) محور انتقال (90) است، از طریق که سوراخ رزوه ای (92) ) پیچ بست (94) متصل به تیغه اره مدور (93) محور انتقال (90) وجه انتهایی وصل شده و شکل می گیرد.15. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 14، مشخص می شود که: یک انتهای محفظه (87) با یک پوشش محافظ (95) برای تیغه اره مدور (93) ارائه شده است.16. دستگاه جراحی الکتریکی ارتوپدی چند منظوره طبق ادعای 15 که مشخصه آن این است که: پوشش محافظ (95) نیز با یک دستگاه تنظیم عمق برش متصل است و دستگاه به طور متقارن در دو طرف پوشش محافظ (95) ثابت می شود. بلوک اتصال (96) در طرفین و بلوک اتصال (97) با سوراخ های متقاطع و شیارهای راهنما دارای یک شیار بلند محدود (99) و یک صفحه موقعیت (98) برای قرار دادن بخشی از تیغه اره مدور (93) است. انتهای صفحه موقعیت (98) به صورت لولایی متصل است، انتهای دیگر به شاتون (100) متصل به بلوک اتصال (96) و حلقه اتصال (101) به طور ثابت به انتهای دیگر موقعیت یابی متصل است. صفحه (98) و یک سر آن توسط حلقه اتصال (101) پشتیبانی می شود. میله پیچ قوسی شکل (102) که از سوراخ بلوک اتصال (97) عبور می کند و 2 مهره تنظیم (103) که به میله پیچ قوسی شکل (
تعمیر دریل ارتوپدی

سر مته های دریل ارتوپدی و اره های پزشکی باید دارای موارد زیر باشند:
• طراحی جمع و جور و راحت برای موقعیت یابی دقیق با یک دست.
• فن آوری های موتور قدرتمند برای عملکرد سریع تر کار.
• ریم با سرعت و استحکام بالا را ارائه دهید.
• دارای شاخص عملکرد و قابلیت اطمینان بالا.
• راه اندازی آسان و شهودی.
• برای حداکثر طول عمر توسط یک کنسول همراه یا باتری های شارژ سریع تغذیه می شود.
• طیف گسترده ای از نکات و تمرینات برای تخصص های مختلف و دسترسی.
شرکت پزشکی طب دائم در تهیه و توزیع انواع اره دریل ارتوپدی فعالیت دارد و به شرح زیر است :
اره دریل ارتوپدی Orthopedic saw که در طب دائم موجود است
قدرتی جناغ سینه (استرنوتومی ) و اره جمجمه و اره مجدد قلب و اره سرعتی ارتوپدی استاندارد و اره ارتوپدی مینی
این اره ارتوپدی دارای قابلیت های چون اتوکلاو وشارز مجدد باطری و راست گرد چپ گرد با قابلیت کنترل سرعت و تمام استریل و قابلیت چرخش تغییر زاویه 180 درجه و سهولت تعویض تیغه و تنظیم زاویه برش و به این صورت که بدون استفاده از اچار استفاده نمود و شارزر و باطری استاندارد و کانکشن استیلیزاسیون استاندارد را دارا می باشد .
و لوازم جانبی درخواستی که به این شارژر و باطری وانواع تیغه اره و کانکشن استریلیزاسیون استاندارد است .
باطری و شارژر اره دریل ارتوپدی
شرکت پزشکی طب دائم در زمینه فروش انواع باطری ها و تعمیرات و همچنین اجاره ان ها فعالیت دارد .



دریل ارتوپدی
دستگاه دریل ارتوپدی چند منظوره، از جمله یک موتور تنظیم کننده سرعت، از این جهت مشخص میشود که شامل یک اتصال دستی، یک مجموعه انتقال انعطافپذیر، یک مته استخوانی، یک سر برش نیمکره، یک سر کاتر تعمیر صورت انتهایی، یک جمجمه است. مته، استئوتوم، اره رفت و برگشتی، اره نوسانی موازی محوری، اره نوسانی عمودی محوری یا اره دایره ای. مدل سودمند پنج عملکرد اصلی دریل ارتوپدی بیش از ده عملکرد جزئی را ادغام میکند.بعضی از ابزارهای مورد استفاده در جراحی ارتوپدی را میتوان با اتوکلاو به طور کلی استریل کرد.دریل ارتوپدی موفق، دریل ارتوپدی باید قدرتمند، کارآمد و سبک باشند.دستگاه دریل ارتوپدی چند منظوره مدل کاربردی متعلق به ابزار یا دستگاه های جراحی است و مربوط به یک دستگاه جراحی دریل ارتوپدی با عملکردهای متعدد مانند ابزارهای مته کاری، اره کردن و جایگزینی سر استخوان ران است و به ویژه برای استفاده در عملیات ارتوپدی مناسب است.ابزارهای جراحی دریل ارتوپدی پزشکی موجود عموماً از یک کانکتور دستی، یک موتور متصل به دو سر کانکتور دستی و یک چاقو، مته یا اره تشکیل شده اند؛ از آنجایی که موتور به طور ثابت به کانکتور دستی متصل است، به سختی جدا می شود و با اتوکلاو به طور کلی نمی توان آن را استریل کرد
دستکاری ارتوپدی “حفاری استخوان” بیشترین اجرا را در جراحی ارتوپدی در مورد درمان جراحی شکستگی استخوان است. فرآیند حفاری با تعدادی از پارامترهای ورودی و خروجی مشخص می شود. مهمترین پارامترهای ورودی، نرخ تغذیه [mm/s] و سرعت مته [rpm] است. آنها نقش مهمی در نتیجه نهایی (پارامترهای خروجی) دارند: آسیب های حرارتی و مکانیکی بافت استخوان و همچنین کیفیت سوراخ. در حین حفاری دستی، این پارامترها توسط جراح بر اساس مهارت های عملی وی کنترل می شود. اما نتایج بهینه دستکاری ها تنها زمانی قابل اطمینان است که پارامترهای ورودی در طول اجرای خودکار فرآیند حفاری تحت کنترل باشند. این کار ویژگی های عملکردی سیستم رباتیک دستی ODRO (ربات حفاری ارتوپدی) را برای حفاری خودکار استخوان ارائه می دهد. برخی از نتایج تجربی نیز نشان داده شده است. مقایسهای بین سیستمهای مشابهی که در ادبیات شناخته شدهاند، که برخی از آنها در بازار موجود هستند، انجام میشود. زمینه های کاربرد ODRO در عمل جراحی ارتوپدی زیر خط کشیده شده است.
عملیات سوراخکاری در جراحی ارتوپدی بهصورت دستی (غیر خودکار) با متههای دستی انجام میشود و عملکرد سوراخکاری به مهارتهای دستی جراح و «دریل کردن با احساس» بستگی دارد [ این بدان معنی است که تشخیص پیشرفت (شناسایی لحظه زمانی که مته از قشر دوم خارج می شود)، کار با سرعت حفاری به اندازه ای خوب است که آسیبی به استخوان یا بافت های نرم بسته به آن وارد نشود
تأثیر عامل ذهنی یک پیش نیاز برای ظهور تعدادی از مشکلات در حفاری دستی است. مهمترین آنها عبارتند از:
تشخیص نادرست تشخیص پیشرفت در حفاری استخوان دو قشر. این بدان معناست که وقتی مته بلافاصله پس از خارج شدن از دیواره دوم استخوان متوقف نمی شود، خطر آسیب به استخوان، ماهیچه ها، اعصاب و بافت های وریدی وجود دارد.استئونکروز حرارتی سلول های استخوانی در نتیجه فرآیند حفاری استخوان. این به معنای کاهش قدرت بیرون کشیدن ایمپلنت-استخوان است.
استئونکروز نوعی وضعیت سلامت بسته به شرایط مختلف است که منجر به مرگ استخوان می شود . نتیجه از دست دادن خون رسانی یا مرگ سلول های استخوانی است. می توان آن را به عنوان عروقی، عفونی، دارویی یا سمی، التهابی، مادرزادی، خود ایمنی، تروماتیک و غدد درون ریز یا متابولیک طبقه بندی کرد. یک نوع خاص از استئونکروز تروماتیک، نکروز حرارتی استخوان است.
سوال کاهش فاکتور ذهنی پاسخ خود را دارد – سوراخ کردن خودکار استخوان. استفاده از ربات ها نقش مهمی در حذف یا به حداقل رساندن خطای انسانی خواهد داشت.
از سال 2000 امکان استفاده از ربات ها در جراحی ارتوپدی افزایش یافته است اما به دلیل هزینه بالایشان همچنان نادر هستند. برای مثال، ROBODOC (Curexo Technology Corp.) برای آرتروپلاستی مفصل ران استفاده می شود و هزینه آن 600000 دلار است در حالی که RIO (MAKO Surgical Corp.) – 1000000 دلار است با این وجود، هزینه های عمل در بعد اجتماعی کاهش می یابد: دوره بهبودی بیمار کمتر از دوره معمولی است. پیچیدگی دستکاری های جراح و خطر خطاهای بالقوه او کمتر می شود از سوی دیگر، کاربرد ربات در جراحی نیازمند نگهداری و آموزش خاص کادر پزشکی با هدف تضمین ایمنی بیمار است.اولین تلاش ها برای کاربرد ربات در جراحی ارتوپدی بر اساس سیستم های دستکاری صنعتی است. گرایش پیشرفته به طراحی سیستمهای دستکاری با توجه به ویژگیهای دستکاریهای ارتوپدی بتن با هدف سادهسازی حداکثری مکانیک ربات است
بنابراین به اصطلاح سیستم های رباتیک دستی ظاهر می شوند سیستم های رباتیک دستی به طور کامل یا جزئی به تعاریف ربات پاسخ می دهند و امروزه جراحی رباتیک تعریف از انجمن جراحان دستگاه گوارش و آندوسکوپی آمریکا و انجمن رباتیک کم تهاجمی (SAGES–MIRA) را پذیرفته است. و در حال حاضر به دلیل کمبود و قیمت بالا از همان روش قبلی یعنی استفاده از دریا ارتوپدی و سرمته رایج است .
دستگاه دریل ارتوپدی چند منظوره، از جمله یک موتور تنظیم کننده سرعت، از این جهت مشخص میشود که شامل یک اتصال دستی، یک مجموعه انتقال انعطافپذیر، یک مته استخوانی، یک سر برش نیمکره، یک سر کاتر تعمیر صورت انتهایی، یک جمجمه است. مته، استئوتوم، اره رفت و برگشتی، اره نوسانی موازی محوری، اره نوسانی عمودی محوری یا اره دایره ای. مدل سودمند پنج عملکرد اصلی دریل ارتوپدی بیش از ده عملکرد جزئی را ادغام میکند.بعضی از ابزارهای مورد استفاده در جراحی ارتوپدی را میتوان با اتوکلاو به طور کلی استریل کرد.دریل ارتوپدی موفق، دریل ارتوپدی باید قدرتمند، کارآمد و سبک باشند.دستگاه دریل ارتوپدی چند منظوره مدل کاربردی متعلق به ابزار یا دستگاه های جراحی است و مربوط به یک دستگاه جراحی دریل ارتوپدی با عملکردهای متعدد مانند ابزارهای مته کاری، اره کردن و جایگزینی سر استخوان ران است و به ویژه برای استفاده در عملیات ارتوپدی مناسب است.ابزارهای جراحی دریل ارتوپدی پزشکی موجود عموماً از یک کانکتور دستی، یک موتور متصل به دو سر کانکتور دستی و یک چاقو، مته یا اره تشکیل شده اند؛ از آنجایی که موتور به طور ثابت به کانکتور دستی متصل است، به سختی جدا می شود و با اتوکلاو به طور کلی نمی توان آن را استریل کرد
دستکاری ارتوپدی “حفاری استخوان” بیشترین اجرا را در جراحی ارتوپدی در مورد درمان جراحی شکستگی استخوان است. فرآیند حفاری با تعدادی از پارامترهای ورودی و خروجی مشخص می شود. مهمترین پارامترهای ورودی، نرخ تغذیه [mm/s] و سرعت مته [rpm] است. آنها نقش مهمی در نتیجه نهایی (پارامترهای خروجی) دارند: آسیب های حرارتی و مکانیکی بافت استخوان و همچنین کیفیت سوراخ. در حین حفاری دستی، این پارامترها توسط جراح بر اساس مهارت های عملی وی کنترل می شود. اما نتایج بهینه دستکاری ها تنها زمانی قابل اطمینان است که پارامترهای ورودی در طول اجرای خودکار فرآیند حفاری تحت کنترل باشند. این کار ویژگی های عملکردی سیستم رباتیک دستی ODRO (ربات حفاری ارتوپدی) را برای حفاری خودکار استخوان ارائه می دهد. برخی از نتایج تجربی نیز نشان داده شده است. مقایسهای بین سیستمهای مشابهی که در ادبیات شناخته شدهاند، که برخی از آنها در بازار موجود هستند، انجام میشود. زمینه های کاربرد ODRO در عمل جراحی ارتوپدی زیر خط کشیده شده است.
عملیات سوراخکاری در جراحی ارتوپدی بهصورت دستی (غیر خودکار) با متههای دستی انجام میشود و عملکرد سوراخکاری به مهارتهای دستی جراح و «دریل کردن با احساس» بستگی دارد [ این بدان معنی است که تشخیص پیشرفت (شناسایی لحظه زمانی که مته از قشر دوم خارج می شود)، کار با سرعت حفاری به اندازه ای خوب است که آسیبی به استخوان یا بافت های نرم بسته به آن وارد نشود
تأثیر عامل ذهنی یک پیش نیاز برای ظهور تعدادی از مشکلات در حفاری دستی است. مهمترین آنها عبارتند از:
تشخیص نادرست تشخیص پیشرفت در حفاری استخوان دو قشر. این بدان معناست که وقتی مته بلافاصله پس از خارج شدن از دیواره دوم استخوان متوقف نمی شود، خطر آسیب به استخوان، ماهیچه ها، اعصاب و بافت های وریدی وجود دارد.استئونکروز حرارتی سلول های استخوانی در نتیجه فرآیند حفاری استخوان. این به معنای کاهش قدرت بیرون کشیدن ایمپلنت-استخوان است.
استئونکروز نوعی وضعیت سلامت بسته به شرایط مختلف است که منجر به مرگ استخوان می شود [4]. نتیجه از دست دادن خون رسانی یا مرگ سلول های استخوانی است. می توان آن را به عنوان عروقی، عفونی، دارویی یا سمی، التهابی، مادرزادی، خود ایمنی، تروماتیک و غدد درون ریز یا متابولیک طبقه بندی کرد. یک نوع خاص از استئونکروز تروماتیک، نکروز حرارتی استخوان است.
سوال کاهش فاکتور ذهنی پاسخ خود را دارد – سوراخ کردن خودکار استخوان. استفاده از ربات ها نقش مهمی در حذف یا به حداقل رساندن خطای انسانی خواهد داشت.
از سال 2000 امکان استفاده از ربات ها در جراحی ارتوپدی افزایش یافته است [5، 6]، اما به دلیل هزینه بالایشان همچنان نادر هستند. برای مثال، ROBODOC (Curexo Technology Corp.) برای آرتروپلاستی مفصل ران استفاده می شود و هزینه آن 600000 دلار است در حالی که RIO (MAKO Surgical Corp.) – 1000000 دلار است با این وجود، هزینه های عمل در بعد اجتماعی کاهش می یابد: دوره بهبودی بیمار کمتر از دوره معمولی است. پیچیدگی دستکاری های جراح و خطر خطاهای بالقوه او کمتر می شود از سوی دیگر، کاربرد ربات در جراحی نیازمند نگهداری و آموزش خاص کادر پزشکی با هدف تضمین ایمنی بیمار است.اولین تلاش ها برای کاربرد ربات در جراحی ارتوپدی بر اساس سیستم های دستکاری صنعتی است. گرایش پیشرفته به طراحی سیستمهای دستکاری با توجه به ویژگیهای دستکاریهای ارتوپدی بتن با هدف سادهسازی حداکثری مکانیک ربات است
بنابراین به اصطلاح سیستم های رباتیک دستی ظاهر می شوند سیستم های رباتیک دستی به طور کامل یا جزئی به تعاریف ربات [12] پاسخ می دهند و امروزه جراحی رباتیک تعریف از انجمن جراحان دستگاه گوارش و آندوسکوپی آمریکا و انجمن رباتیک کم تهاجمی (SAGES–MIRA) را پذیرفته است. و در حال حاضر به دلیل کمبود و قیمت بالا از همان روش قبلی یعنی استفاده از دریا ارتوپدی و سرمته رایج است .
باطری و شارژر اره ارتوپدی
شرکت پزشکی طب دائم در زمینه فروش انواع باطری ها و تعمیرات و همچنین اجاره ان ها فعالیت دارد .
انواع تیغ اره و سرمته
شرکت پزشکی طب دائم در زمینه تولید و فروش و اجاره انواع تیغ اره ها در انواع سایز و مدل ها اماده ارائه خدمات است . که انواع تیغ اره ها انگشتی پهن و باریک در عرض های 15-22-24 هستند موجود می باشد و به صورت سفارشی هرنوع و تیغه ای مورد درخواست باشد با فرستادن نمونه یا عکس شرکت پزشکی طب دائم اماده ساخت و ارائه به شما می باشد .
مته ها ابزارهای برشی هستند که برای استخراج مواد و ایجاد سوراخ، اغلب در اطراف مقاطع، استفاده می شوند. این مته های ارتوپدی دارای الگوهای زیر هستند:
- مته اتصال سریع استاندارد
- مته کالیبره شده فلوت
- مته اتصال سریع فلوت استاندارد
ما همچنین سفارشی سازی ابزار را بر اساس نیاز و تمایل شما ارائه می دهیم. همه ابزارهای ضد زنگ ما برای اینکه بخشی از کیت جراحی شما باشند

اره ارتوپدی
اره ها اورتوپدی در اطاق¬های عمل ارتوپدی و بعضاً در اطاق عمل های جنرال و ترمیمی و استفاده می¬گردد. این دستگاه با اتصال به تیغه هایی با سایزهای مختلف، بر اساس نوع عمل و سایز بدن بیمار (برای اطفال و بزرگسالان و اندام تحتانی و فوقانی) شرایط استفاده را مهیا می سازد.
دستگاه اره ارتوپدی چند منظوره، از جمله یک موتور تنظیم کننده سرعت، از این جهت مشخص میشود که شامل یک اتصال دستی، یک مجموعه انتقال انعطافپذیر، یک مته استخوانی، یک سر برش نیمکره، یک سر کاتر تعمیر صورت انتهایی، یک جمجمه است. مته، استئوتوم، اره رفت و برگشتی، اره نوسانی موازی محوری، اره نوسانی عمودی محوری یا اره دایره ای. مدل سودمند پنج عملکرد اصلی دریل ارتوپدی بیش از ده عملکرد جزئی را ادغام میکند.بعضی از ابزارهای مورد استفاده در جراحی ارتوپدی را میتوان با اتوکلاو به طور کلی استریل کرد اره ارتوپدی موفق، اره ارتوپدی باید قدرتمند، کارآمد و سبک باشند.دستگاه دریل ارتوپدی چند منظوره مدل کاربردی متعلق به ابزار یا دستگاه های جراحی است و مربوط به یک دستگاه جراحی اره ارتوپدی با عملکردهای متعدد مانند ابزارهای مته کاری، اره کردن و جایگزینی سر استخوان ران است و به ویژه برای استفاده در عملیات ارتوپدی مناسب است.ابزارهای جراحی اره ارتوپدی پزشکی موجود عموماً از یک کانکتور دستی، یک موتور متصل به دو سر کانکتور دستی و یک چاقو، مته یا اره تشکیل شده اند؛ از آنجایی که موتور به طور ثابت به کانکتور دستی متصل است، به سختی جدا می شود و با اتوکلاو به طور کلی نمی توان آن را استریل کرد
دستکاری ارتوپدی “حفاری استخوان” بیشترین اجرا را در جراحی ارتوپدی در مورد درمان جراحی شکستگی استخوان است. فرآیند حفاری با تعدادی از پارامترهای ورودی و خروجی مشخص می شود. مهمترین پارامترهای ورودی، نرخ تغذیه [mm/s] و سرعت مته [rpm] است. آنها نقش مهمی در نتیجه نهایی (پارامترهای خروجی) دارند: آسیب های حرارتی و مکانیکی بافت استخوان و همچنین کیفیت سوراخ. در حین حفاری دستی، این پارامترها توسط جراح بر اساس مهارت های عملی وی کنترل می شود. اما نتایج بهینه دستکاری ها تنها زمانی قابل اطمینان است که پارامترهای ورودی در طول اجرای خودکار فرآیند حفاری تحت کنترل باشند. این کار ویژگی های عملکردی سیستم رباتیک دستی ODRO (ربات حفاری ارتوپدی) را برای حفاری خودکار استخوان ارائه می دهد. برخی از نتایج تجربی نیز نشان داده شده است. مقایسهای بین سیستمهای مشابهی که در ادبیات شناخته شدهاند، که برخی از آنها در بازار موجود هستند، انجام میشود. زمینه های کاربرد ODRO در عمل جراحی ارتوپدی زیر خط کشیده شده است.
عملیات سوراخکاری در جراحی ارتوپدی بهصورت دستی (غیر خودکار) با متههای دستی انجام میشود و عملکرد سوراخکاری به مهارتهای دستی جراح و «دریل کردن با احساس» بستگی دارد [ این بدان معنی است که تشخیص پیشرفت (شناسایی لحظه زمانی که مته از قشر دوم خارج می شود)، کار با سرعت حفاری به اندازه ای خوب است که آسیبی به استخوان یا بافت های نرم بسته به آن وارد نشود
تأثیر عامل ذهنی یک پیش نیاز برای ظهور تعدادی از مشکلات در حفاری دستی است. مهمترین آنها عبارتند از:
تشخیص نادرست تشخیص پیشرفت در حفاری استخوان دو قشر. این بدان معناست که وقتی مته بلافاصله پس از خارج شدن از دیواره دوم استخوان متوقف نمی شود، خطر آسیب به استخوان، ماهیچه ها، اعصاب و بافت های وریدی وجود دارد.استئونکروز حرارتی سلول های استخوانی در نتیجه فرآیند حفاری استخوان. این به معنای کاهش قدرت بیرون کشیدن ایمپلنت-استخوان است.
استئونکروز نوعی وضعیت سلامت بسته به شرایط مختلف است که منجر به مرگ استخوان می شود نتیجه از دست دادن خون رسانی یا مرگ سلول های استخوانی است. می توان آن را به عنوان عروقی، عفونی، دارویی یا سمی، التهابی، مادرزادی، خود ایمنی، تروماتیک و غدد درون ریز یا متابولیک طبقه بندی کرد. یک نوع خاص از استئونکروز تروماتیک، نکروز حرارتی استخوان است.
سوال کاهش فاکتور ذهنی پاسخ خود را دارد – سوراخ کردن خودکار استخوان. استفاده از ربات ها نقش مهمی در حذف یا به حداقل رساندن خطای انسانی خواهد داشت.
از سال 2000 امکان استفاده از ربات ها در جراحی ارتوپدی افزایش یافته است [5، 6]، اما به دلیل هزینه بالایشان همچنان نادر هستند. برای مثال، ROBODOC (Curexo Technology Corp.) برای آرتروپلاستی مفصل ران استفاده می شود و هزینه آن 600000 دلار است در حالی که RIO (MAKO Surgical Corp.) – 1000000 دلار است با این وجود، هزینه های عمل در بعد اجتماعی کاهش می یابد: دوره بهبودی بیمار کمتر از دوره معمولی است. پیچیدگی دستکاری های جراح و خطر خطاهای بالقوه او کمتر می شود از سوی دیگر، کاربرد ربات در جراحی نیازمند نگهداری و آموزش خاص کادر پزشکی با هدف تضمین ایمنی بیمار است.اولین تلاش ها برای کاربرد ربات در جراحی ارتوپدی بر اساس سیستم های دستکاری صنعتی است. گرایش پیشرفته به طراحی سیستمهای دستکاری با توجه به ویژگیهای دستکاریهای ارتوپدی بتن با هدف سادهسازی حداکثری مکانیک ربات است
بنابراین به اصطلاح سیستم های رباتیک دستی ظاهر می شوند سیستم های رباتیک دستی به طور کامل یا جزئی به تعاریف ربات پاسخ می دهند و امروزه جراحی رباتیک تعریف از انجمن جراحان دستگاه گوارش و آندوسکوپی آمریکا و انجمن رباتیک کم تهاجمی (SAGES–MIRA) را پذیرفته است. و در حال حاضر به دلیل کمبود و قیمت بالا از همان روش قبلی یعنی استفاده از دریا ارتوپدی و سرمته رایج است .
راه های تامین انرژی اره ارتوپدی
3 نوع دریل ارتو بر اساس منبع تغذیه آنها وجود دارد: باتری، پنوماتیک و برقی. بیایید نگاهی به مزایا و معایب هر نوع بیندازیم. باتری 1. باتری ها آزادی حرکت زیادی را فراهم می کنند 2. اضافه شدن ویژگی های اخیر در سیستم های جراحی باتری 3. وجود ویژگی دو ماشه به شما این امکان را می دهد تا با فشار ساده یک انگشت، جهت پیچ و/یا سوراخ کردن دستگاه را تغییر دهید.
پنوماتیک 1. سیستم های پنوماتیک از واحد هوای فشرده برای تغذیه ابزارهای جراحی مانند مته ارتو استفاده می کنند. این بدان معناست که نباید نگران قطع برق باشید. 2. تعمیر آنها در مقایسه با باتری و گزینه های برقی ارزان تر است برق 1. منبع تغذیه پیوسته در مقابل برق باتری 2. تعمیر و نگهداری ارزان تر و کم 3. سبک تر از اکثر گزینه های پنوماتیک و باتری آزادی حرکت در جراحی بزرگترین مزیت دریل ارتو با باتری است. مته های جراحی الکتریکی یا پنوماتیکی حرکات را به دلیل سیم برق یا شیلنگ برای تامین گاز محدود می کنند.
طرف مقابل خطر از بین رفتن باتری در حین جراحی و نیاز به تعویض است. فرد باید دائماً باتری بخرد و ذخیره کند. هزینه باتری می تواند به هزینه عملیاتی بالا کمک کند. اگر OEM سیستم را به عنوان پایان عمر اعلام کند و تولید باتری را متوقف کند، ممکن است مجبور شوید مته را ارتقا دهید. استفاده از باتری های سازگار غیر OEM ممکن است همیشه یک گزینه نباشد. لیتیوم در مقابل NiCad باتریهای لیتیوم یون (یا لیتیوم یون) از نظر اندازه کوچکتر، سبکتر، کم تعمیر و نگهداری هستند و انرژی بیشتری نسبت به باتریهای NiCad ارائه میکنند. آنها همچنین از نظر زیست محیطی ایمن تر از باتری های NiCad هستند. در صورت استفاده از باتریهای NiCad، هنگام دور انداختن باتریها باید مراقب باشید زیرا کادمیوم سمی و خطرناک است. برای بیمارستانها حتی اگر باتریهای لیتیوم یونی ممکن است هزینه بیشتری داشته باشند، ممکن است در مقایسه با باتریهای NiCad به دلیل ماندگاری و زمان کار طولانیتر، بهتر باشند. با این حال، حمل و نقل یا مسافرت با مته Ortho ممکن است مشکل ساز باشد زیرا خطوط هوایی اجازه استفاده از باتری های Li-ion را نمی دهند.
ابزارهای جراحی الکتریکی اگر منبع تغذیه مداوم و پشتیبان یو پی اس در بیمارستان دارید، دریل های ارتو برقی گزینه بسیار خوبی هستند. با اره های برقی نباید نگران تمام شدن باتری باشید.اره ارتو برقی نیز نسبت به سایر مته ها سبک تر و در مقایسه با مته های پنوماتیکی کم تعمیر و نگهداری هستند. اره برقی که از طریق سیم برق وصل می شوند ممکن است در مقایسه با سیستم باتری دار آزادی حرکت را نداشته باشند، اما استفاده از آنها همچنان آسان است. چه زمانی برای دریل پنوماتیک ارتو برویم با یک ابزار پنوماتیک باید از تامین گاز/هوای ثابت اطمینان حاصل کنید و با شلنگ متصل کار کنید. با این حال، اگر بیمارستان شما در یک شهر کوچکتر با منبع تغذیه نامنظم است، این ممکن است بهترین گزینه باشد. متههای ارتو پنوماتیک نیز از نظر سرمایهگذاری اولیه ارزانتر و همچنین نگهداری ارزانتر در مقایسه با هزینه ثابت باتریهای گران قیمت هستند. دریل های پنوماتیک ارتو نیاز به تمیز کردن و نگهداری منظم دارند.
منبع گاز به اندازه کافی تمیز نباشد، ممکن است نیاز به سرویس مکرر تجهیزات داشته باشد. خطر هجوم مایع وجود دارد که ممکن است قطعه دست را متوقف کند. حتی اگر اره ارتو بادی نیاز به تعمیر و نگهداری منظم دارند، تعمیر آنها در مقایسه با متههای ارتو برقی یا باتری ارزانتر است. در دسترس بودن قطعات جایگزین نیز برای مته های پنوماتیک بهتر است. استریل کردن – همیشه دستورالعمل OEM را برای استریل کردن قطعات دستی مته ارتو برای جلوگیری از خوردگی و آسیب دنبال کنید.
1-کاربرد اره ارتوپدی :
باید اره و دریلی انتخاب کنیم که مختص جراحت استخوان و مفاصل باشد . اره های که برای فک استفاده میشوند با دریل هایی که برای استخوان ها ومفاصل استفاده میشود لزوما یکسان نیستند.
2-ارگونومی اره ارتوپدی :
منظور از ارگونومی بودن در واقع همان خوش دست بودن و مطابق دست جراح و ناحیه جراحی بیمار بودن است. عمدتا به وزن دریل یا اره هم بر می گردد یادتان باشد اره یا دریلی بهتر است که در هین فشرده بودن برای جلوگیری از لغزش حین کار سبک نیز باشد.
3-شکل اره ارتوپدی :
برخی از دریل ها و اره های جراحی برای عمل روی استخوان های بلند به شکل تفنگی هستند . برخی دیگر به شکل قلم هستند که بیشتر برای جراحی های ظریف و یا استخوان های کوچک مناسب است.
4-منبع تغذیه اره ارتوپدی:
ابزارهای برقی جراحی می توانند پنوماتیک ، برقی یا باتری دار باشند .میزان نگهداشتن منبع برق جز مواردی است که می توانید به آن توجه کنید.
5-تطبیق پذیری اره ارتوپدی:
امکان جایگزینی ابزار مورد استفاده وجود دارد (تیغه ) بعضی از مدل ها فقط یک عملکرد دارند ، بعضی دیگر چندین عملکرد را با تغییر سرمته یا تیغ اره دارند. در حالت دوم ، می توان هد دستگاه را تغییر داد.البته اکثر دستگاه چند منظوره هستند.
6-میزان سر و صدا دستگاه اره ارتوپدی:
برخی از مدل ها پر سر و صدا هستند که می توانند کار را مختل کنند و یا باعث افزایش فشار روانی در حین عمل شوند. ترجیح داده می شود مدل آرام و کم صداتر را انتخاب کنید.
7-وجود ماشه تغییر جهت ساعتگرد و پاد ساعتگرد اره ارتوپدی :
با این کار می توانید جهت پیچ و یا سوراخ کردن دستگاه را با فشار ساده انگشت تغییر دهید.
8-قابلیت استریل شدن اره ارتوپدی:
دستگاهی مناسب است که بتوان بعد از عمل آن را استریل کرد و در دستگاه اتوکلاو آن را قرار داد البته این ویژگی را تقریبا همه اره های ارتوپدی باید داشته باشند.
9-کانولیتد بودن اره ارتوپدی :
این ویژگی باعث می شود که دستگاه قابلیت انعطاف پذیری بیشتری به خاطر وجود کانال در دستگاه برای تنظیم ریمر باشد.
10-گارانتی بودن و خدمات پس از فروش اره دریل ارتوپدی :
این ویژگی هم که یک ویژگی عمومی برای همه لوازم برقی است مدت گارانتی بودن دستگاه و یا تعمیر دستگاه در صورت خرابی بسیار مهم است.
11-قدرت اره دریل ارتوپدی:
داشتن یک ابزار جراحی قدرتمند به این معنا است که اره کردن را دقیق و قوی انجام دهد قدرتمند بودن دستگاه بیشتر به نوع و جنس موتوری است که در دریل یا اره قرار گرفته است.
اره دریل ارتوپدی از نظر سبک وسنگینی
سبک :از ابزار سبک برای جراحی های ظریف در نواحی کوچک مثل دست استفاده می شود،
سنگین :برای جراحی روی قسمت های بزرگ بدن استفاده می شود. دریل ها می توانند مکانیکی، برقی، شارژی باشن
نکات ایمنی استفاده از اره دریل ارتوپدی
به موارد زیر هنگام استفاده از اره ارتوپدی توجه بفرمایید
1-قبل از انجام عمل از سالم بودن دستگاه اطمینان حاصل فرمایید .
2- در هنگام عمل دست خود را نزدیک به قسمت چرخان و سرمته نفرمایید چرا این کار سبب گیر کردن دستکش و پیچش ان دور دستگاه و شکستگی انگشت میشود .
3- از سرمته کند و خراب استفاده نفرمایید چون عمر دستگاه را کوتاه و موجب خرابی زود هنگام دستگاه می شود .
4- باطری های اره ارتوپدی به هیچ عنوان قابل اتوکلاو نیست
اره نوسانی
خط تولید اره با محصولات ارتوپدی اره سازگار است و راهی مقرون به صرفه برای بیمارستان های دامپزشکی برای خرید تجهیزات کاملاً جدید است.
اره نوسانی تک ماشه ای که با باتری کار می کند، ابزار دقیقی است که می تواند در استخوان های بزرگ و استخوان های کوچک استفاده شود. طراحی ارگونومیک و تطبیق پذیری این ابزار برقی با باتری، امکان کنترل سریع و دقیق برش استخوان را فراهم می کند و کنترل و دقت جراح را در انجام یک عمل جراحی افزایش می دهد. تمام اقلام کاملا نو و فقط برای استفاده دامپزشکی هستند. گارانتی 2 سالهاره
کیت شامل: اره نوسانی تک ماشه
2 عدد باتری قابل شارژ
شارژر باتری تکی
قاب باتری انتقال استریل
سپر انتقال استریل
سایر ملحقات هندپیس مدولار نیز برای خرید موجود است
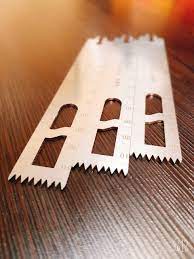
این یک ابزار ارتوپدی محبوب است که برای طیف گسترده ای از روش های مختلف استفاده می شود که شامل سیم های انعطاف پذیر است که به منظور ایجاد سطوح برش متعدد تابیده شده اند. یا فولاد ضد زنگ درجه: ست باکیفیت بالا ساخته شده است. فولاد ضد زنگ درجه بندی کنید که روی شما خم نمی شود و نمی شکند. کاملاً قابل اتوکلاو است تا بتوان با خیال راحت دوباره و دوباره بدون تخریب از آن استفاده کرد. دقیق و بادوام: مجموعه اره ارتوپدی مقاوم در برابر خوردگی است، دارای روکش آینه ای بالایی است و بدون کدر شدن است. تمیز کردن اولتراسونیک برای بالاترین کیفیت ممکن تحویل داده شده است. اره ها اورتوپدی در اطاق¬های عمل ارتوپدی و بعضاً در اطاق عمل های جنرال و ترمیمی و استفاده می¬گردد. این دستگاه با اتصال به تیغه هایی با سایزهای مختلف، بر اساس نوع عمل و سایز بدن بیمار (برای اطفال و بزرگسالان و اندام تحتانی و فوقانی) شرایط استفاده را مهیا می سازد
شرکت پزشکی طب دائم
جهت مشاوره و خرید با ما در ارتباط باشید .
شماره تماس 09046422055
اینستاگرام : TEB DAEM
ادرس : شیراز بلوار کریم خان زند نبش ک 42 زند ط فوقانی فروشگاه کوثر شرکت پزشکی طب دائم
https://tebdaem.com/wp-admin/post.php?action=edit&post=965365
https://tebdaem.com/wp-admin/post.php?action=edit&post=6309
https://tebdaem.com/wp-admin/post.php?action=edit&post=12019